Ни для кого не секрет, что мир робототехники активно «заимствует» особенности поведения живых организмов в природе. Это не только позволяет создавать для практических целей роботов, наделенных особенностями биологических организмов, но и открывает возможности более глубокого и наглядного изучения вопросов, связанных с эволюционными процессами. В конечном итоге это направление может привести к удивительному слиянию науки и природы. Сегодня рассмотрим 10 роботов, имитирующих поведение своих живых прототипов.
Робот-змея
Подводный робот-змея Eelume способен выполнять очень полезную функцию — проводить инспекцию и ремонт различной глубоководной инфраструктуры. Нынешние поколения автономных подводных устройств весьма неуклюжи, медленны и дороги в использовании, но не робот Eelume. Он двигается под водой, как подводная змея и может очень быстро и безопасно достигать тех мест, куда обычным глубоководным аппаратам никогда не добраться.
Машина в настоящий момент работает от внешнего источника питания и подключена к кабелю. Однако компания Kongsberg Maritime, создавшая робота-змею, уже работает над созданием автономного источника питания, который позволит существенно повысить ее свободу действий. Робот-обезьяна
Робот по имени «Роко» создан пока лишь в виде дизайнерского концепта и не имеет рабочего прототипа. Но зато какой это концепт! Покрытая мехом, полностью роботизированная обезьяна, способная пробираться даже через самые непроходимые джунгли и леса и при этом не нарушать распорядка жизни дикой природы.
Дизайнеры этого робота планируют наделить его сразу несколькими полезными функциями и навыками. Например, «Роко» сможет работать полностью автономно и доставлять небольшие посылки (с едой или аптечкой первой помощи) в удаленные места, до которых невозможно будет добраться по дороге. Он также может служить в качестве компаньона, будучи, например, запрограммированным в качестве помощника при ориентировании на местности или использоваться для слежения за обстановкой вокруг и высматривания хищников поблизости.
«Роко» будет покрыт искусственным мехом и передвигаться через лесные массивы, как самая обычная обезьяна. Другими словами, своим присутствием он никак не нарушит баланс дикой природы, в отличии от человека или дрона. Робопчелы
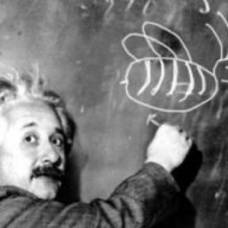
В течение последнего десятилетия дикие пчелы неожиданно и резко стали жертвой так называемого синдрома краха колоний. Количество пчел резко сокращается из года в год и никто пока не в состоянии ответить на вопрос, почему это происходит. В июне 2014 года гарвардские ученые пришли к идее, которая, по их мнению, способна помочь снизить последствия эффектов синдрома краха колоний. Они предложили разработать крошечных робопчел, которые, наряду с настоящими, могли бы опылять растения и сельскохозяйственные угодья.
Что удивительно, концепт доказал свою состоятельность и работоспособность. Правда, есть одна трудность. Нужно найти способ, чтобы рой этих роботизированных пчел мог между собой общаться и работать как единое целое, что свойственно для настоящих пчел. Проблема заставила серьезно задуматься, но решение, к сожалению, пока не найдено. По мнению специалистов, подобные роботы могли бы помочь агрокультурной сфере восстановиться после многомиллиардных убытков, вызванных потерями настоящих пчелиных колоний. Робот-рыба MuddyBot
Дэниэл Голдман из Технологического института Джорджии создал новое поколение роботов-амфибий, способных передвигаться по сложным поверхностям, вроде зыбучего песка и илистого дна. Для постройки своего робота Голдман обратился к эволюционной науке. Он создал робота, по поведению очень похожего на илистого прыгуна, небольшой рыбки, которая может передвигаться как в воде, так и на суше.
Созданный робот доказал, что для рыбки наличие хвоста не очень-то и важно. Он лишь слегка помогает в выборе направления движения, а также при перемещении по скользкой наклонной поверхности, предотвращая скатывание вниз. Робот-кенгуру
Сухожилия в лапах кенгуру служат в качестве пружин, накапливая определенный запас энергии, который тратится на следующих прыжок. Это наделяет животное удивительным запасом выносливости. Немецкая инженерная компания Festo продемонстрировала, как эту особенность можно воплотить в робототехнике, создав робота-кенгуру.
Прототип управляется жестами с помощью коммерчески доступных специальных электронных браслетов, которые также можно использовать и при управлении дронами. Робот-жираф
Робототехники из компании Boston Dynamics несколько лет вели разработку человекоподобных и собакоподобных роботов для гражданского и военного использования. Их новейшее творение — SpotMini. Создан для помощи по дому и выглядит, как робот-жираф, но размером с собаку.
По своей сути SpotMini является уменьшенной копией хорошо нам известного робота «Спот», которому добавили специальную роботизированную руку/голову, делающую его похожим на маленького жирафа. Рука наделила робота некоторыми интересными способностями. Например, SpotMini может задерживать «голову» в одной позиции и при этом двигать остальным телом. Рука/голова способна хватать объекты и поднимать их, если те падают. В качестве источника питания SpotMini использует батарею, которой хватает примерно на полтора часа работы.
Несмотря на то, что робота в первую очередь создали скорее для развлекательных целей, в будущем подобные машины могут очень пригодиться в хозяйстве, помогать пожилым людям и инвалидам. Робот-паук
В Институте компьютерного дизайна при Университете Штутгарта (Германия) исследователи создали так называемую «мобильную роботизированную систему плетения нитевых структур». По сути система представлена в виде двух компактных роботов, которые, как пауки, могут ползать по стенам и плести из нитей различные объекты, например, гамаки.
Ученые планируют увеличить масштаб и задействовать больше роботов, чтобы создавать более сложные объекты, а также наделить роботов возможностью ползать по отвесным и скользким поверхностям. Робот-таракан
Биомеханик Роберт Фулл из Калифорнийского университета в Беркли потратил несколько лет на изучение движений животных и исследование потенциала использования этих особенностей в роботизированной среде. Заинтересовавшись возможностями тараканов — при необходимости сжимать свое тело и пролазить в самые узкие места, даже несмотря на наличие твердого панциря, — Фулл обнаружил, что эти насекомые обладают уникальной особенностью передвижения. На основе этих знаний он построил робота-таракана.
RoboRoach построен с применением развивающегося метода так называемой «мягкой робототехники», в которой характерно использование гибких материалов и полимеров. Роботизированные насекомые обладают огромным потенциалом и их весьма легко и дешево производить. Эти крошечные механические букашки (как и их настоящие протеже) способны проникать в самые труднодоступные места и использоваться, например, для разведки при различных чрезвычайных ситуациях и природных катаклизмах, в зонах боевых действий и других опасных местах. Робот-птица
Проблема вездесущих перелетных птиц известна очень давно, но ее действительно действенного решения нет до сих пор. Если птицам понравилось какое-то место, то через время там обязательно поселится целый выводок или того хуже — целая стая пернатых. Птицы не только уничтожают посевы, мешают грамотной работе воздушных сообщений, но и разносят смертельные болезни.
Решение данной проблемы предложила компания Enter Clear Flight Solutions, представившая летающего робота, ведущего себя, как хищная птица. Робот прошел успешную проверку. В густонаселенных птицами регионах благодаря использованию робота-птицы наблюдалось снижение активности птиц до 50 процентов. Робот выглядит и ведет себя, как настоящая хищная птица, активно размахивает крыльями и наводит страх на окружающих пернатых. Его создатели отмечают, что RoBird можно использовать и для охоты за определенной единичной жертвой. В настоящий момент управление RoBird осуществляется операторами с земли, однако компания-создатель уже ведет разработку их автономной версии. Киберскат
Международная группа ученых под руководством гарвардского исследователя Кита Паркера создала искусственного ската, имитирующего движения своего настоящего протеже. И хотя на первый взгляд может показаться, что ничего выдающегося в этой машине нет, это совсем не так. Дело в том, что это не совсем робот. Это скорее киборг, созданный на базе искусственных и биологических компонентов.
Основой для киберската служит позолоченный скелет, на который «надели» тонкую полимерную кожу. Тело состоит из 200 000 сердечных клеток лабораторных крыс, кардиомиоцитов. Клетки наделили светочувствительностью, поэтому управлять скатом можно путем изменения частоты и пульсации направленного на него света. Свет заставляет мышцы сжиматься и за счет этого киберскат начинает плыть. Позолоченный скелет киборга обладает свойствами накопления энергии, которая тоже задействуется для движения.