|
|
Инженеры создали микроробота с механизмом имитирующим хвост ногохвостки
 Francisco Ramirez Serrano et al. / Science Robotics, 2025 Американские инженеры вдохновились строением ногохвосток (мелких насекомых, известных своей прыгучестью) и создали миниатюрного робота, способного ходить и прыгать. Масса четырехногого робота составила менее трех грамм, а длина — 6,1 сантиметра. При таких физических параметрах робот способен прыгать на расстояние до 1,4 метра, что в 23 раза превышает длину его тела. Достигается это за счет установленного в хвосте робота прыжкового механизма, в котором энергия сначала запасается в пружине, а потом резко высвобождается с помощью защелки. Помимо прыжков робот также может ходить и поворачивать, выбирая направление для прыжка. Описание конструкции опубликовано в журнале Science Robotics. Некоторые роботы разрабатываются для работы в средах, недоступных человеку. Одно из таких направлений — микророботы, способные проникать в узкие пространства и сложные конструкции. Например, инженеры из Гарвардского университета уже несколько лет занимаются разработкой миниатюрных четвероногих роботов HAMR массой несколько граммов, которые способны бегать по суше и воде, и передвигаться даже вверх ногами. Теперь инженеры под руководством Роберта Вуда (Robert Wood) доработали робота HAMR и научили его прыгать. Конструкцию прыжкового механизма разработчики подсмотрели у ногохвосток, — насекомых, использующих хвост (прыгательную вилку) для высоких прыжков. Созданный ими робохвост представляет собой механизм с актуатором из сплава с памятью формы, трех жестких звеньев и пружины. При нагревании сплав с памятью формы сокращается, запасая энергию в пружине. Когда сила натяжения достигает критической точки, механизм срабатывает, высвобождая запасенную энергию и запуская прыжок.
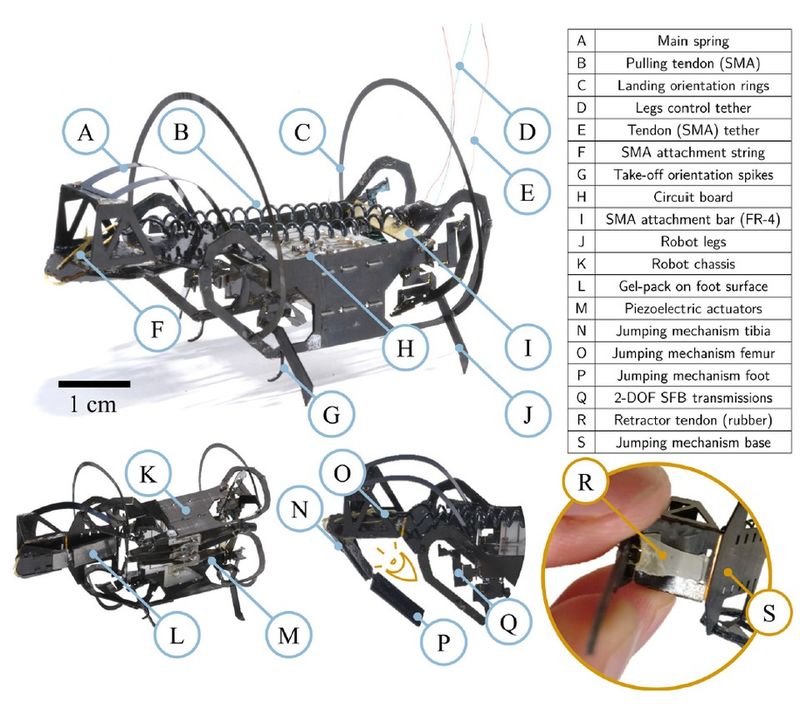 Francisco Ramirez Serrano et al. / Science Robotics, 2025 Инженеры построили два прототипа: робота на базе ходячего роботаракана HARM и упрощенный вариант, способный только прыгать. Как и в предыдущих версиях, в движение ноги робота приводят пьезоактуаторы. В основании каждой ноги установлено два таких актуатора — один из них отвечает за движение в горизонтальной плоскости, а другой в вертикальной. Масса робота с прыжковым механизмом составляет 2,7 грамма, а длина — 6,1 сантиметра. Для оптимизации конструкции прыжкового механизма инженеры также разработали математическую модель. Результаты вычислений показали, что оптимальный угол отрыва от поверхности составляет около 59 градусов.
YouTube Во время испытаний разработчики протестировали оба варианта конструции. Прыжковый модуль на раме общей массой 2,2 грамма достиг рекордной дальности прыжка в 1,4 метра (23 длины тела) при скорости отрыва около 20 метров в секунду. В то же время оснащенный прыжковым модулем роботаракан HAMR смог успешно сочетать ходьбу и прыжки во время передвижения по сложному рельефу, демонстрируя устойчивые приземления и повторяемость прыжков. В ходе тестов робот преодолевал препятствия, менял направление движения, запрыгивал на возвышенности, перескакивал пропасти, а также использовал прыжковый механизм для взаимодействия с объектами, например, толкая предметы.
01-03-2025 | Просмотров: 629
Комментарии
Комментировать
Комментировать
|

Ещё по теме
|
|
|