Учёные из (США) и (Франция) попробовали выяснить, насколько тяжело муравьям в их сложных подземных ходах передвигаться по оптимальному, самому короткому из возможных маршрутов.
В качестве модели послужили аргентинские муравьи (Linepithema humile) — одни из самых опасных инвазивных в мире, средние размеры рабочей особи которых равны 2–3 мм.
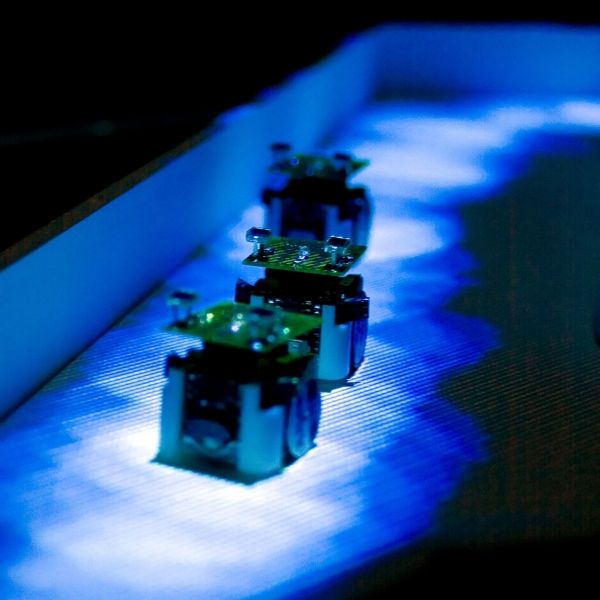
Одна из Алис в лабиринте (увеличение) (здесь и ниже фото Simon Garnier et al.).
Для моделирования их системы ориентации в подземных ходах были созданы сходных размеров роботы (учёные назвали их Алисами). Вместо феромонов, оставляемых муравьями, использовались световые следы. В начале эксперимента, когда никаких световых следов в незнакомом лабиринте ещё не было, роботы применяли «исследовательскую тактику», наблюдаемую и в природе, когда при сохранении общего направления движения повороты на каждом конкретном стыке ходов выбираются случайно (так же ведёт себя в лабиринте и неподготовленный человек).
В итоге роботы постепенно стали выбирать такие развилки, которые вели по кратчайшему пути к намеченной цели. После того как в лабиринте стали встречаться световые следы, роботы, увидевшие их, немедленно сворачивали в том направлении, которое подсказывали эти сигналы.
Выяснилось, что даже без программирования роботов на идентификацию и запоминание конкретной геометрии ходов они очень быстро начинали выбирать самые короткие и эффективные маршруты к цели.
При этом они пользовались только световыми следами (аналогом феромонов муравьев) и запрограммированным случайным механизмом выбора поворотов в лабиринте:
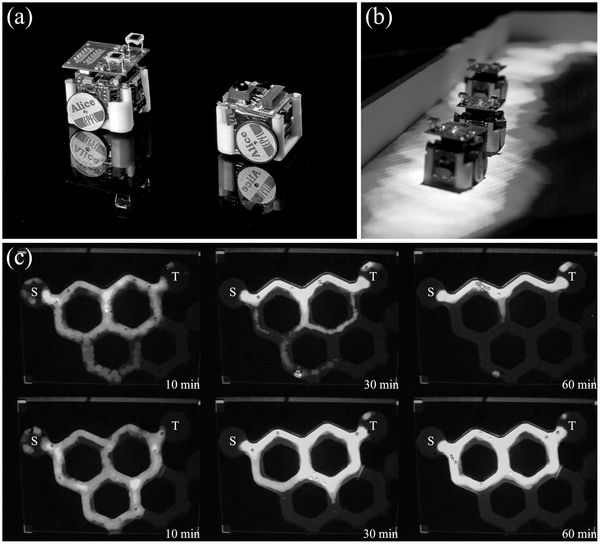
Сходные результаты были получены и другими исследовательскими группами, хотя они применяли не столь миниатюрных роботов, действовавших в более простых лабораторных условиях:
Авторы работы отмечают, что всё это решает проблему, давно замеченную при исследовании данного вида муравьёв: у них довольно плохое зрение, а в подземных туннелях оно и вовсе ни к чему. Однако передвигаются они с очень значительной скоростью и весьма уверенно.
То, что роботы смогли повторить поведение насекомых, обойдясь без сложных когнитивных «мозгов», показывает, что и обычные муравьи в природных условиях не нуждаются ни в чём таком. «Исследование демонстрирует, что эффективная навигация и добыча корма могут достигаться у муравьёв при минимальных когнитивных способностях, — резюмирует Симон Гарнье (), ведущий автор работы. — Это также показывает, что геометрия транспортной сети играет критическую роль в потоке информации как в муравьиных, так и в человеческих сообществах».
При всём том поведение именно аргентинских муравьёв, как было обнаружено в 2009 году, имеет весьма сложный характер (то есть они вовсе «не без мозгов»). Так, члены трёх суперколоний этого вида (6 000 км вдоль европейского побережья, 900 — вдоль калифорнийского и японская суперколония западного побережья) не были враждебны друг к другу при любых обстоятельствах. Выяснилось, что генетически все три суперколонии являются близкими родственниками, в то время как колонии меньших размеров, неродственные упомянутым, выказывали враждебность по отношению к другим гнёздам, не состоящим с ними в близком родстве.
В разных вариантах лабиринтов роботы довольно скоро стали выбирать оптимальный маршрут, ориентируясь только на следы других роботов.
Всё это не слишком характерно для других видов муравьёв. Экстремально быстрая экспансия «аргентинцев» в мире, по всей видимости, связана именно с этой неагрессивностью по отношению к соседним гнёздам своего вида, входящим в те же суперколонии. Рабочие муравьи могут даже смешиваться с муравьями другого гнезда, фактически переселяясь в него, в то время как обычные муравьиные сообщества тратят огромные усилия на борьбу с себе подобными, а переход в другие колонии возможен только для побеждённых в конфликте — в виде «рабства». Кстати, вывод в исследовании 2009 года : все три суперколонии аргентинских муравьёв входят в одну мегаколонию, «огромная протяжённость которой может быть сравнима только с человеческим обществом».