Возможно, что миниатюрные летающие роботы, представляющие собой сочетание машины и насекомого, помогут людям выжить в условиях катастроф.
Обыкновенная комнатная муха – чудо с точки зрения авиастроения. Одна из причин ее феноменальной способности ловко уклоняться от мухобоек – исключительная частота взмахов крыльев: около 200 в секунду. Такая необычная способность обеспечивается сложным биомеханическим устройством.
Крылья мухи не связаны непосредственно с мышцами грудного отдела. Насекомое периодически напрягает и расслабляет мышцы, заставляющие грудной отдел менять свою форму. Эти деформации в свою очередь ведут к тому, что крылья начинают трепетать так же, как колеблются бранши (ветви) камертона после удара. Таким способом мухе удается с очень малыми усилиями преобразовать ничтожное количество энергии во множество движений.
Инженеры, подталкиваемые миниатюризацией электронных схем компьютерной техники и методами производства микроизделий, делают все, что в их силах, пытаясь создать крошечные летательные аппараты, воспроизводящие двигательные способности насекомых. Аппарат DelFly Micro, представленный в 2008 г. исследователями из Делфтского технологического университета в Нидерландах, при массе всего в 3 г имеет размах крыльев 100 мм и способен нести крошечную видеокамеру. Летательный аппарат, созданный в Гарвардской лаборатории микророботов, еще меньше: его масса составляет лишь 0,06 г (что в четыре раза больше массы мухи), но управлять его полетом после запуска невозможно. Однако истинной ахиллесовой пятой механических насекомых стало энергопотребление: никому пока не удалось найти способ запасти в миниатюрных батареях достаточно энергии, чтобы питать аппараты больше нескольких минут полета.
В последние годы мы сделали упор на поиски способа обойти технические ограничения. Вместо того чтобы создавать с нуля механического жука, мы решили использовать в качестве летательных аппаратов существующих в природе насекомых. Это позволило отказаться от тяжелых батарей и техники производства микроизделий и сосредоточиться на создании систем управления, вмешивающихся по мере необходимости в полет. Иными словами, насекомое летает само, но схема, подключенная к его нервной системе, передает ему команды оператора: повернуть направо или налево, набрать высоту или снизиться. В итоге получается летающий киборг – отчасти насекомое, отчасти машина.
К этой идее мы пришли пять лет назад, когда один из авторов (Мичель Махарбис) участвовал в симпозиуме по летающим киборгам, который проводило Агентство по передовым оборонным проектам (DARPA). (Хиротака Сато, специалист по микротехнологиям, признает, что мало разбирается в энтомологии.) Участники симпозиума обсуждали технологии, которые могли бы позволить биологам принимать и регистрировать электрические сигналы от отдельных мышц летящего насекомого. Менеджер DARPA по программам Амит Лал (Amit Lal), организовавший семинар, считал, что пришло время сосредоточиться на этих достижениях, дабы определить, нельзя ли передавать электрические сигналы и на мышцы через имплантированные микросхемы, заставляя насекомое двигаться так, как это нужно нам.
Насекомое–киборг потенциально могло бы выполнять различные военные задачи, например сообщать, сколько человек и кто именно находится в здании или подземелье, чтобы солдаты, которым предстоит штурмовать помещение, знали, что их ждет. Кремниево–углеродные гибриды могли бы также стать основой для создания роботов–инсектоидов, предназначенных для выполнения мирных задач, таких как поиск выживших под завалами, вызванными землетрясением.
ПЕРВЫЕ ЭКСПЕРИМЕНТЫ
Предварительная работа с техасскими бронзовками показала, что управлять работой крыльев можно. В этой первой модели команды были заранее заложены в микроконтроллер, но для радиоуправления в состав полезной нагрузки жука необходимо было включить радиоприемник, а он был слишком тяжел для насекомого длиной в 2 см.
Авторы тщательно задали последовательности электрических импульсов для стимуляции сравнительно больших зон нервно–мышечной системы жука, чтобы управлять его полетом.Если бы схема стимуляции основывалась на возбуждении отдельных нейронов, добиться
воспроизводимости результатов для разных особей было бы невозможно. Точка присоединения импланта могла бы изменяться в ходе полета, что делало бы жука неуправляемым.
РАДИОУПРАВЛЕНИЕ ПОЛЕТОМ
Инженеры разработали систему передачи радиокоманд жукам в полете,во многом подобную тем, какие применяют моделисты для управления моделями автомобилей, самолетов и вертолетов.
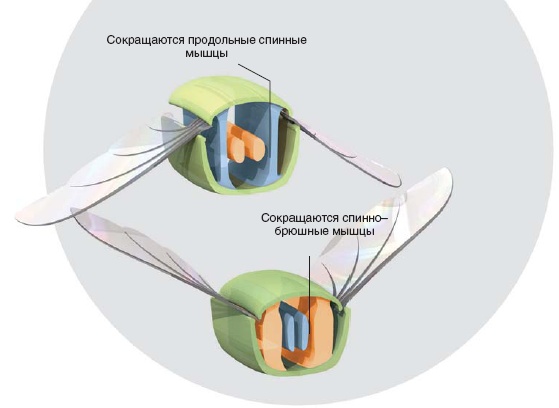
МЕХАНИКА ПОЛЕТА ЖУКА
Жуки движут своими крыльями подобно тому, как вибрируют ножки камертона. Вместо того чтобы непосредственно двигать крылья вверх и вниз, две системы мышц (показанные на рисунке оранжевыми в фазе сокращения и голубыми в фазе расслабления), работая поочередно, деформируют грудную часть панциря жука. В результате крылья очень быстро движутся вверх–вниз
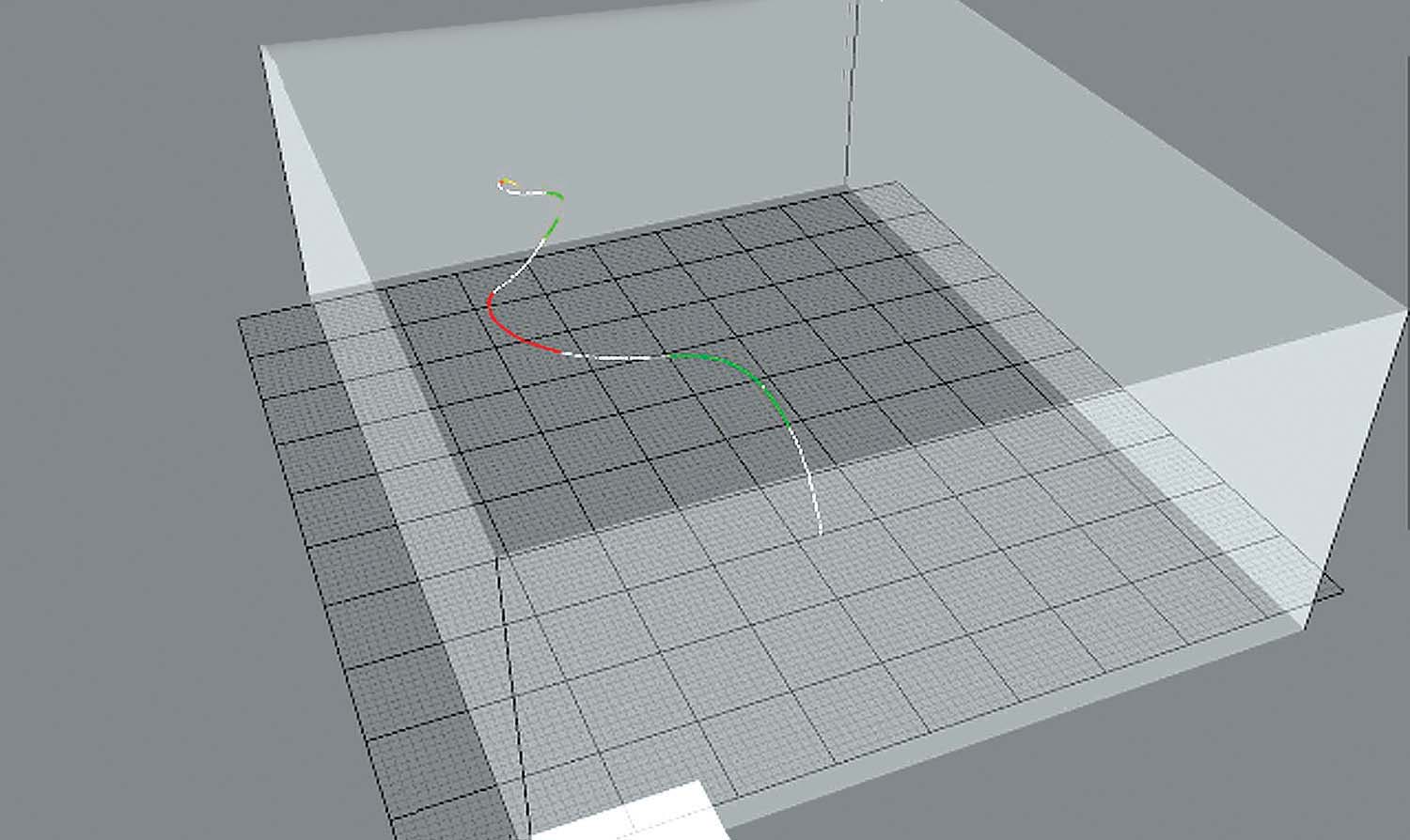
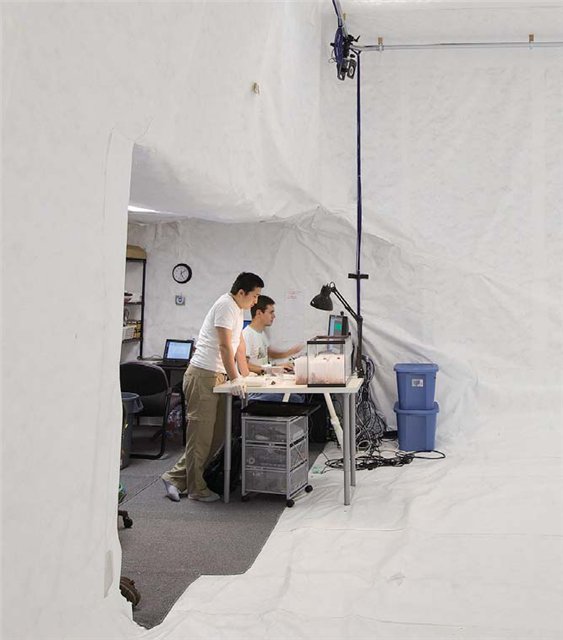
ТРАЕКТОРИЯ ПОЛЕТА КИБОРГА
Исследователи в лаборатории Махарбиса помещали жуков–киборгов в специальную испытательную камеру (снимок внизу, стоит Сато). Полет начался (белая линия в правом нижнем углу рисунка справа) со стимуляции оптических долей жука, что запустило «полетное поведение». Электрические импульсы, подававшиеся на правую базалярную мышцу, заставляли жука поворачивать налево, а стимуляция левой базалярной мышцы вызывала поворот направо. Закончился полет (верхний левый угол), когда на оптические доли был подан импульс большей длительности, чем первый.
Почему именно жуки
Множество серьезных исследований, описывающих полет саранчи, бабочек и мух, были выполнены еще до симпозиума DARPA. Я полагал, что, базируясь на этих монографиях, смогу уменьшить число фальстартов, которые всегда сопровождают начало работ в новой области исследований. Бабочки и саранча имеют достаточно крупные размеры, но не могут нести большой нагрузки, поэтому от них пришлось отказаться. Остались мухи.У этих насекомых много достоинств. Во–первых, биологам о них многое известно. Майкл Дикинсон (Michael H. Dickinson) и его коллеги из Калифорнийского технологического института очень подробно исследовали, какие мышцы,когда и где должны сократиться,чтобы легкокрылое существо набрало высоту или повернуло. Во–вторых, мухи исключительно эффективно используют энергию,что позволяет им двигать крыльями с фантастической скоростью.Однако в техническом отношении работать с мухами очень трудно: они так малы, что для вживления в них необходимых проводов и микросхем нужно быть нанохирургом. Я начал искать альтернативу. Стрекозы велики и прекрасные летуны, но слишком хрупки.Может быть, подойдут тараканы? И тут мне попалась на глаза работа The Biology of the Coleoptera –классический путеводитель по миру жесткокрылых, написанный Роем Кроусоном (Roy A. Crowson)в 1981 г.
Я узнал, что жуки летают почти так же, как мухи. Ответственные за полет мышцы грудного отдела жука деформируют его панцирь таким образом, что крылья колеблются подобно ветвям камертона. Типы мышц и их расположение тоже представлялись близкими к таковым у мух. Мысль о том,с чего начать, подсказали несколько изящных исследований жесткокрылых, выполненные после 1950–х гг. Но важнее всего, пожалуй, размеры этих насекомых: есть жуки и больше 10 см, и всего 1 мм длиной. Кроме того, они составляют около одной пятой всего числа известных видов насекомых. Таким образом, теоретически они казались легкодоступными.Но я столкнулся с новой проблемой: в США почти никто не занимался разведением жуков, достаточно крупных для моих целей. На то, чтобы добиться стабильной поставки «подопытных», которых мы сегодня закупаем у заводчиков в Европе и Азии, нашей лаборатории потребовалось несколько лет.
И в это время к нашим исследованиям подключился Хиротака Сато,второй из авторов настоящей статьи – химик с опытом работы в производстве микроизделий. Нашей целью было показать, что мы можем дистанционно отправлять насекомое в полет, и управлять направлением и скоростью этого полета,а также останавливать его, когда оно доберется до заданного места.Как инженеры мы хотели, чтобы все функции выполнялись с минимальным вредом для насекомого.
Прежде всего нам предстояло определить минимальный набор поведенческих функций, контроль над которыми необходим для создания примитивнейшего летающего киборга. Для управления жуком в свободном полете мы выбрали дистанционное радиоуправление, подобное тому, какое используется для моделей автомобилей, самолетов и вертолетов.Требовалось обеспечить возможность по желанию запускать и останавливать работу крыльев, увеличивать и уменьшать скорость и высоту полета насекомого и заставлять его поворачивать направо и налево. Мы ни в коем случае не хотели контролировать все характеристики полета, поскольку жуки и так прекрасно управляют своим положением относительно горизонта и корректируют траекторию полета в зависимости от ветра и наличия препятствий.
В то же время нужно было получить возможность передавать сигналы непосредственно в нервно–мышечную систему насекомого, чтобы пресечь попытки жука сделать что–то помимо заданного. Любой киборг, способный выйти из–под контроля, будет негодным роботом.Мы действовали не вслепую.Большинство жуков, выбранных нами для работы, способны нести нагрузку, составляющую до 20–30% их собственной массы. Таким образом, максимальные габариты аппаратуры «системы управления» определялись размерами самого насекомого. Поскольку нам было известно, какие мышцы управляют работой крыльев, у нас появились основания полагать,что подача электрических сигналов изменяемой частоты на мышцы каждой из сторон тела насекомого даст нам возможность изменять траекторию его полета,меняя режимы работы крыльев.
Мы знали также, что жуки в полете широко используют зрительную информацию. Как и у человека,свет, попадающий в глаз насекомого, возбуждает светочувствительные нейроны. От них сигналы пе-редаются через зрительные доли мозга в средний мозг и в ганглии,где обрабатываются, снабжая насекомое зрительной информацией в процессе его движения. Также мы располагали данными и о том, что во многих случаях важна и интенсивность света. Так, стоило резко выключить свет в помещении, как жуки немедленно прекращали полет. Это заставило предположить,что им необходим некий сенсорный сигнал от глаз, чтобы продолжать работать крыльями. Мы рассудили, что стимуляция зрительных долей мозга или зон вблизи их основания может вызывать необходимые двигательные реакции. Поскольку вживление электродов непосредственно в глаза или зрительные доли мозга снизит способность насекомого маневрировать,мы приняли решение о стимуляции зон у основания зрительных долей. Стимулировать отдельные нейроны нам не потребовалось.Когда мы посылали нужный электрический импульс в область вблизи основания зрительных долей мозга жука, остальную работу выполняли его собственные системы,и насекомое отправлялось в полет.
Нанесение вреда
Первому успешному полету предшествовало немало неудач. Сначала мы полгода работали с жуками–чернотелками (Zophobas morio) длиной около 1,5 см и массой в 1 г.
Их легко приобрести в зоомагазинах,поскольку личинки этих насекомых используются в качестве корма для гекконов и других мелких пресмыкающихся. К сожалению, мы так и не сумели заставить чернотелок летать. Мы сотни раз подбрасывали их в воздух, но они просто не желали раскрывать крылья. Похоже, летать они не любят. Однако,работая с этими жуками, мы многое узнали об анатомии насекомых.
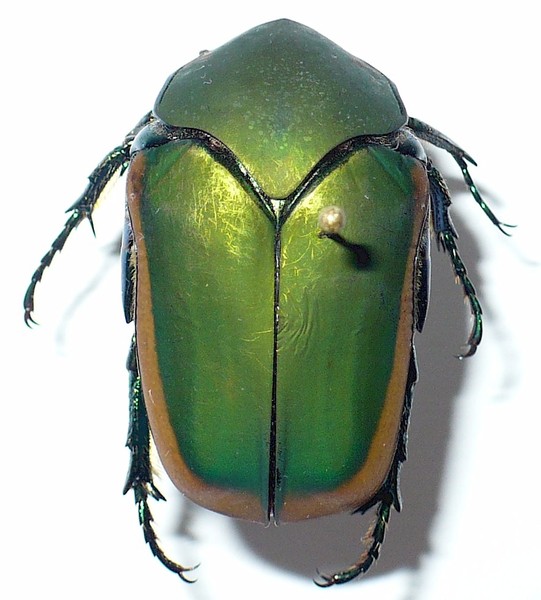
В итоге мы переключились на техасских бронзовок (Cotinis texana) длиной 2 см и массой 1–1,5 г, широко распространенных на юго–востоке США. Техасская бронзовка –не только хорошо известный летун,но и вредитель фруктовых садов.И за год–другой мы получили тысячи этих жуков от фермеров, которые не могли поверить, что кто–то готов не просто избавлять их от вредителей, но еще и приплачивать.
В результате первых опытов с Zophobas и Cotinis мы поняли, как именно удерживать жуков, не причиняя им вреда, и где приклеивать микропровода: на спине, вблизи мышц крыльев и у основания головы (клеили мы воском). Мы сконструировали и изготовили специальные миниатюрные схемные
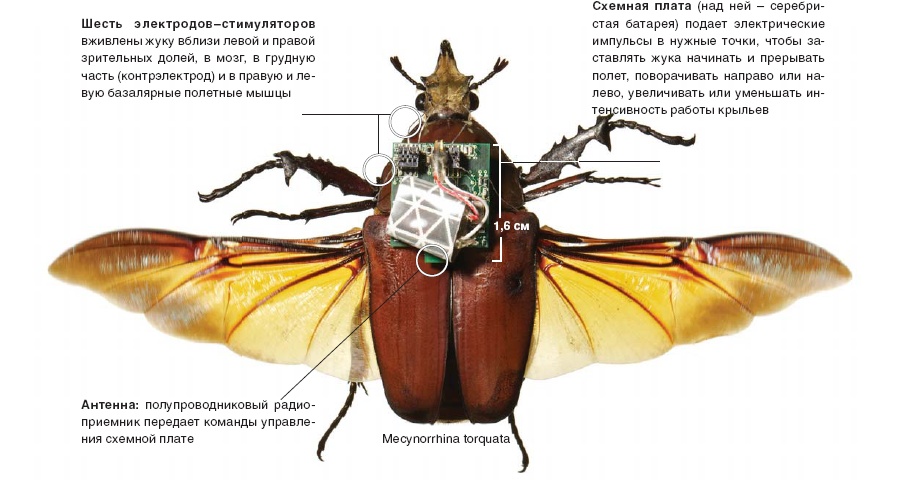
платы для приема радиокоманд и подачи электрических сигналов,с которыми мы экспериментировали. (Жуки, оснащенные как одним из первых вариантов нашей конструкции, так и самым последним, созданным в апреле 2010 г.,представлены на иллюстрациях к статье.) Сегодня базовая система состоит из микропроцессора со встроенным радиоприемником (для приема команд), батареи питания и нескольких серебряных проводов диаметром 125 мкм, вживленных в мозг и полетные мышцы жука.
Поскольку техасские бронзовки способны нести полезную нагрузку всего в 200–450 мг, первоначальная система не имела радиоприемника. Для проверки управляемости мы заранее закладывали полетные команды в микропроцессор и наблюдали жука в свободном полете, привязанного к нити или закрепленного внутри карданова подвеса. (Закрепление жука в таком подвесе позволяет наблюдать его в «полете на месте».)
Первый успех с жуками Cotinis был достигнут через два месяца. После нескольких экспериментов мы нашли довольно большой участок нейронов, электрическая стимуляция которого позволяла осуществлять воспроизводимые и предсказуемые модуляции полета. Мы установили, что стимуляция зоны мозга жука, лежащей как раз посередине между его левой и правой зрительными долями,быстрыми электрическими импульсами (длительностью около 10 мс, или частотой около 100 Гц) заставляет насекомое бить крыльями и принимать правильную полетную позу почти во всех случаях (в 97% случаев, чтобы быть точными). Не менее интересно,что один более длительный импульс, поданный в ту же зону,полностью останавливал движение крыльев. Иными словами, мы смогли запускать и останавливать полет жука, подавая сначала один импульс, заставляющий крылья работать, а затем другой, который прекращал работу крыльев.
Нам представляется, что более длительный импульс вызывает перегрузку нейронов у основания зрительной доли мозга, блокируя передачу электрических сигналов.В результате разрушается пусковой сигнал, который поддерживает вибрацию крыльев. Мы установили, что электрические импульсы срабатывали снова и снова,независимо от того, чего хотелось бы жуку в данный момент. Если тогда, когда мы начинали подавать 10–мс импульсы, насекомое ползло по столу, оно начинало бить крыльями и взлетало. Если мы переворачивали жука на столе на спину, он начинал бить крыльями в этом положении. Если же он летел, а мы подавали дополнительный импульс, то его крылья переставали работать,он падал и продолжал ползти.Никаких признаков того, что наши подопытные получали повреждения, даже в случае падения на пол, мы не наблюдали.Жуки с вживленными проводами жили столько же, сколько и их свободные собратья (несколько месяцев). Они точно так же летали,ели и спаривались. Далее мы обнаружили, что, подавая поочередно в быстрой последовательности сигналы «пуска» и «остановки», можно модулировать колебания крыльев. Это значит, что, когда жук летит, быстрая поочередная подача этих двух команд не прекращает работу его крыльев, но несколько тормозит ее. В результате изменяется создаваемая крыльями тяга, что позволяет нам управлять мощностью, развиваемой насекомым для полета, как пилот использует ручку газа для управления тягой двигателя самолета.
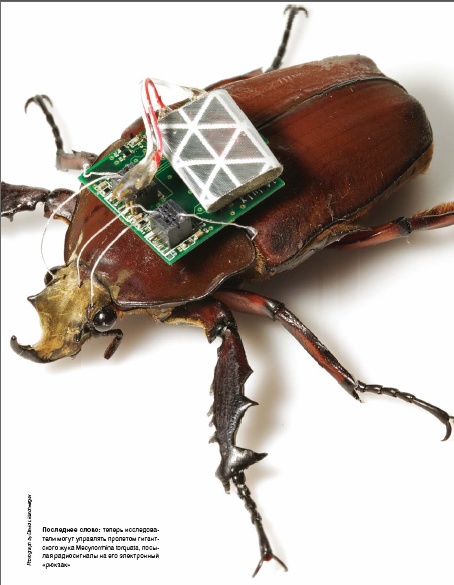
Чтобы заставлять жука поворачивать, мы вживляли микропровода в его правую и левую базалярные мышцы. Подавая 10–мс импульсы в правую мышцу, мы заставляли ее развивать большую мощность, в результате чего насекомое поворачивало налево.В конце концов мы начали работать с жуками Mecynorrhina torquata, масса которых достигает 8 г, что делает их идеальными носителями радиоприемника и полезной нагрузки, которую мы разработали к тому времени.
Дальнейшие шаги
Не менее очевидна, чем некоторые наши достижения, необходимость идти дальше. Хотя мы доказали, что можем заставить жуков поворачивать налево и направо и летать по кругу, мы хотим добиться возможности направлять их полет по сложным трехмерным траекториям, чтобы они могли преодолевать препятствия, например влетать в помещения через дымоходы или трубы. С этой целью мы включили в полезную нагрузку миниатюрные микрофоны, регистрирующие колебания их крыльев в полете. Когда звук достигает определенного уровня, грубо характеризующего интенсивность колебаний крыла, мы можем подать точно выбранные стимулирующие импульсы на мышцы, управляющие поворотами жука в полете.
Аппаратура работает превосходно, но нам бы пригодилась помощь в создании программ для управления полетами наших подопытных насекомых. Мы обратились к некоторым своим коллегам, имеющим больший опыт в деле создания программ для полностью искусственных летательных аппаратов. На основе имеющегося опыта работы с беспилотными вертолетами Питер Аббил (Pieter Abbeel) из Калифорнийского университета в Беркли со своими студентами Светославом Колевым (Svetoslav Kolev) и Нимбусом Гехаузеном (Nimbus Goehausen) разрабатывают систему управления, которая будет разбивать сложные команды (например, команду «повернуть на 200 направо») на составляющие (например, «подавать 10–мс импульсы на левую базалярную мышцу в течение стольких–то секунд»). Тогда пользователю достаточно будет вводить некоторые коррекции курса, а задавать стимулы, необходимые для того, чтобы направить жука на требуемый курс, будет микропроцессор. Чтобы выяснить, какими должны быть эти последовательности импульсов, мы использовали магнитно–резонансную томографию, обширные исследования анатомии жуков и высокоскоростную съемку их в полете с целью определения пространственной конфигурации и функций некоторых других мышц, отвечающих за работу каждого крыла. На основе полученных данных мы сегодня нацеливаемся на различные мышцы, чтобы получить возможность более стабильно управлять курсом и креном жука в свободном полете.
Нужно ли создавать жуков–киборгов?
Окажутся ли насекомые с дистанционным управлением полезными в качестве роботов, – вопрос открытый, хотя мы считаем, что да. На рынок и впредь будут поступать все меньшие по размерам и все более легкие микроконтроллеры и радиоприемники, что позволит нам разрабатывать более надежные и точные устройства управления нашими жуками–киборгами. Поскольку разработка миниатюрных источников питания большой емкости или механических крыльев с высоким КПД по-прежнему представляют большие трудности, наши жуки с их сверхэффективными мышцами будут иметь значительное преимущество перед полностью искусственными летательными аппаратами.
Из всех потенциальных последствий, которые может вызвать наша работа, наиважнейшим мы считаем следующее: по мере миниатюризации вычислительных устройств и углубления наших знаний о биологических системах человечество будет все настойчивее пытаться встраивать искусственные интерфейсы в контуры управления живых существ. Разработка деталей вначале на насекомых поможет избежать ошибок при работе с более высокоорганизованными существами вроде крыс и мышей, а впоследствии и с людьми. Возможно, это позволит отложить на будущее многие этические вопросы (в частности – о свободе воли), которые встанут острее, когда начнется работа с позвоночными. Работа с жуками–киборгами не помешает ученым заниматься созданием полностью искусственных роботов (ведь человек иногда делает более эффективные машины, чем природа). Но наука мягкой интеграции живых существ с рукотворными устройствами только зарождается.