
|
|
Японцы создали систему управления собакой с помощью лазеров
Японские инженеры разработали жилет с лазерами и камерой, который можно использовать для дистанционного управления собакой. Благодаря лазерным пятнам на полу оператор заставляет собаку двигаться в нужном направлении, а изображение с камеры можно использовать для исследования окружающего пространства, рассказывают разработчики в статье, представленной на конференции CBS 2018. Как правило, разработки, позволяющие управлять животными, представляют собой инвазивные нейроинтерфейсы. Они подключаются к нервной системе организма и благодаря электрическим импульсам вызывают либо непосредственно сокращения определенных мышц, либо действуют на рецепторы или другие органы, после чего животное само решает начать движение. К примеру, в прошлом году сингапурские исследователи создали носимую плату для жука, которая стимулирует его усики и создает ощущение столкновения с препятствием, в результате чего жук двигается в противоположную сторону. Несмотря на то, что ученые считают такой подход более перспективным, пока такие технологии находятся на начальном этапе развития и далеки от реального применения. Часть инженеров предлагает пока использовать куда более простой способ — создавать для животного привлекающие визуальные стимулы. В прошлом году американский инженер показал забавную реализацию такого метода и создал механизм, который управляет расположением сосиски над собакой и заставляет ее двигаться в нужную сторону. Инженеры под руководством Сатоши Тадокоро (Satoshi Tadokoro) из Университета Тохоку реализовали тот же принцип управления с помощью внешних раздражителей другим образом — с помощью лазерного пятна на полу перед собакой. Устройство представляет собой жилет, на котором закреплены три или четыре лазерных проектора, в зависимости от прототипа, а также камера. Лазеры направлены статично таким образом, чтобы пятно от них находилось перед собакой или по бокам от нее. Устройство связано с геймпадом оператора, который может управлять движением животного, переключая работающий проектор.
Разработчики провели испытания на трех пуделях, в результате которых они смогли определить оптимальный угол размещения лазеров, их яркость и цвет. Кроме того, инженеры показали на практике, что оператор может посылать собаку к нужному месту и получать оттуда видео в реальном времени.
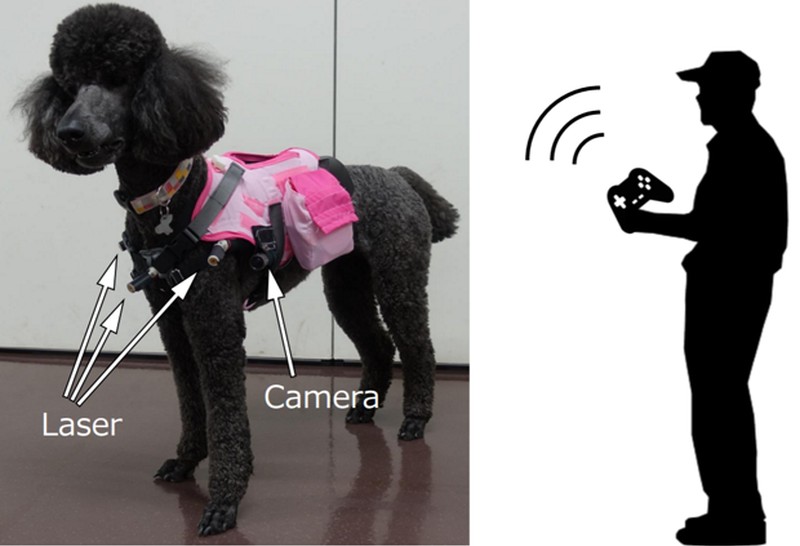
Один из ранних прототипов устройства Kazunori Ohno et al. / CBS 2018
30-10-2018 | Просмотров: 2013
Комментарии
Комментировать
Комментировать
|

Ещё по теме
|
|
|

























